4 मिनट पढ़ें
सोल्स 4341-4342: एक ऊबड़-खाबड़ सड़क

पृथ्वी नियोजन तिथि: सोमवार, 21 अक्टूबर, 2024
क्यूरियोसिटी के व्यस्त सप्ताहांत के बाद, टीम योजना के एक और दिन के लिए तैयार है। हम आज अपनी योजना के दोनों तलों पर पूर्ण योजना बनाने के लिए पृथ्वी-मंगल समय के ऑफसेट का लाभ उठाने में सक्षम हैं। इस योजना के लिए, मैंने मोबिलिटी रोवर प्लानर के रूप में काम किया और क्यूरियोसिटी की ड्राइव की योजना बनाई।
पहला सोल कुछ सुदूर विज्ञान से शुरू होता है। इस ब्लॉक में, चट्टान में विभिन्न परतों में भिन्नता देखने के लिए “ईवे झील” का केमकैम एलआईबीएस और मास्टकैम संयुक्त अवलोकन है। इसमें एक केमकैम आरएमआई और “ओल्मस्टेड प्वाइंट” लक्ष्य का एक मास्टकैम भी है, यह देखने के लिए कि क्या इसमें रासायनिक अंतर हैं जो इसे आसपास की चट्टानों की तुलना में अधिक गहरा बनाते हैं। मास्टकैम “डिप्रेस्ड लेक” की एक स्टीरियो छवि भी ले रहा है (यह देखने के लिए कि क्या यह ढीला ब्लॉक स्टिमसन या सल्फेट इकाइयों से संबंधित है) और केमकैम एईजीआईएस लक्ष्य रोवर की एक छवि अंतिम ड्राइव के बाद स्वचालित रूप से पाई जाती है।
एक झपकी के बाद, क्यूरियोसिटी “चक पास” लक्ष्य पर कुछ संपर्क विज्ञान करने के लिए उठती है, जो लेमिनेशन और नोड्यूल के साथ आधारशिला का एक टुकड़ा है। हम हाथ जमा करने से पहले इस चट्टान का डीआरटी ब्रशिंग, एमएएचएलआई और एपीएक्सएस अवलोकन करते हैं ताकि हम दूसरे सोल पर ड्राइव करने के लिए तैयार हो सकें। देर दोपहर में, प्रकाश की स्थिति का लाभ उठाने के लिए, हमारे पास मास्टकैम इमेजिंग का एक और छोटा सेट है – एक वायुमंडलीय आकाश स्तंभ अवलोकन और इस नए कोण से “फैसिनेशन बुर्ज” का एक स्टीरियो मोज़ेक।
दूसरा सोल भी कुछ रिमोट सेंसिंग के साथ शुरू होता है। हम केमकैम एलआईबीएस और चक पास के मास्टकैम के साथ संपर्क विज्ञान का अनुसरण करते हैं। केमकैम एक और देखने का कोण प्राप्त करने के लिए “व्हाइटबार्क पास” के नीचे सफेद सल्फर पत्थरों के क्षेत्र में पूर्व की ओर देखने वाला एक आरएमआई भी लेता है। इसमें कुछ वायुमंडलीय इमेजिंग, नेवकैम डेक मॉनिटरिंग (यह देखने के लिए कि रोवर के डेक पर धूल कैसे घूम रही है) और एक बड़ा धूल शैतान सर्वेक्षण भी है।
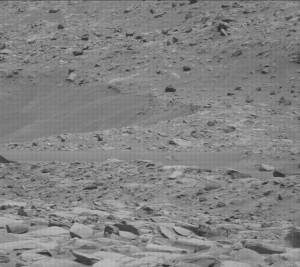
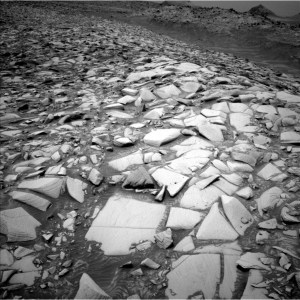
इमेजिंग के बाद, हम गाड़ी चलाने के लिए तैयार हैं। यह इलाक़ा बहुत पेचीदा रहा है. हालाँकि ढलान तेज़ नहीं हैं, यह एक बहुत ही चट्टानी क्षेत्र है, जैसा कि आप छवि में देख सकते हैं, जिससे सुरक्षित रास्ता ढूंढना मुश्किल हो जाता है। हमें न केवल उन चीज़ों पर गाड़ी चलाने के बारे में चिंता करने की ज़रूरत है जो बहुत बड़ी या बहुत तेज़ हैं, बल्कि हमें यह भी सुनिश्चित करना है कि पहिये किसी चट्टान के किनारे से न टकराएं या उन्हें चट्टान में न धकेलें, जिससे वे घिसकर रुक न जाएं। . इसका मतलब यह भी है कि हमारे पास बहुत दूर तक अच्छा स्टीरियो डेटा नहीं है क्योंकि चट्टानें हमारे दृश्य को अवरुद्ध कर देती हैं। आखिरी जटिलता यह है कि हमें पीछे की ओर ड्राइव करना होगा – अन्यथा, रोवर हार्डवेयर उस समय के दौरान पृथ्वी के क्यूरियोसिटी के दृश्य को अवरुद्ध कर देगा जब हम उसे नई योजना भेजना चाहते हैं। जब हम पीछे की ओर ड्राइव करते हैं, तो रोवर हार्डवेयर क्यूरियोसिटी के दृश्य को अवरुद्ध कर देगा, इसलिए हमें अपनी छवियों में स्पष्ट दृश्य प्राप्त करने के लिए मुड़ना होगा। हम यह सुनिश्चित करने के लिए अतिरिक्त फ़्रेम भी लेते हैं कि हम अगली ड्राइव के लिए सबसे अच्छा रास्ता ढूंढ सकें। इन सबके साथ, हम आज लगभग 32 मीटर (लगभग 105 फीट) ड्राइव करने में सक्षम हो गए। स्टीयरिंग खतरे से बचने के लिए एक छोटे से मोड़ के बाद, हम अपने अगले प्रमुख इमेजिंग स्टॉप के रास्ते पर काफी सीधे रास्ते पर चलने में सक्षम थे। ड्राइव के बाद, हमारे पास हमारी सामान्य पोस्ट-ड्राइव इमेजिंग होती है, जिसमें गोधूलि MARDI छवि भी शामिल है।
हम इस इलाके में अब तक भाग्यशाली रहे हैं और अपनी हालिया ड्राइव को सफलतापूर्वक पूरा करने में सक्षम रहे हैं। आशा है यह अभियान भी सफल होगा!
नासा की जेट प्रोपल्शन प्रयोगशाला में मिशन ऑपरेशंस इंजीनियर एशले स्ट्रूप द्वारा लिखित