2 मिनट पढ़ें
सोल 4553: वापस बॉक्सवर्क पर!
न्यू ब्रंसविक विश्वविद्यालय में लुसी थॉम्पसन, प्लैनेटरी जियोलॉजिस्ट द्वारा लिखित
पृथ्वी योजना तिथि: मंगलवार, 27 मई, 2005
हम एक सफल लंबे सप्ताहांत और लगभग 42 मीटर ड्राइव दूरी (लगभग 138 फीट) के बाद आज योजना पर लौटते हैं। हमने जिज्ञासा को व्यस्त रखने के लिए शुक्रवार को चार गतिविधियों की योजना बनाई, जबकि अमेरिका स्थित विज्ञान टीम और इंजीनियरों ने मेमोरियल डे की छुट्टी के लिए कल समय निकाल लिया। जैसा कि हम आज सुबह रोवर के सामने नए कार्यक्षेत्र और ड्राइव दिशा के दृश्य की प्रशंसा करने के लिए मिले, मुझे एहसास हुआ कि अब हमने लगभग 13 साल पहले उतरने के बाद से लगभग 35 किलोमीटर (लगभग 22 मील) (लगभग 22 मील) से अधिक पर चढ़कर चढ़ाई की है, और हम हाल ही में नए क्षेत्र के साथ छेड़खानी करते हैं।
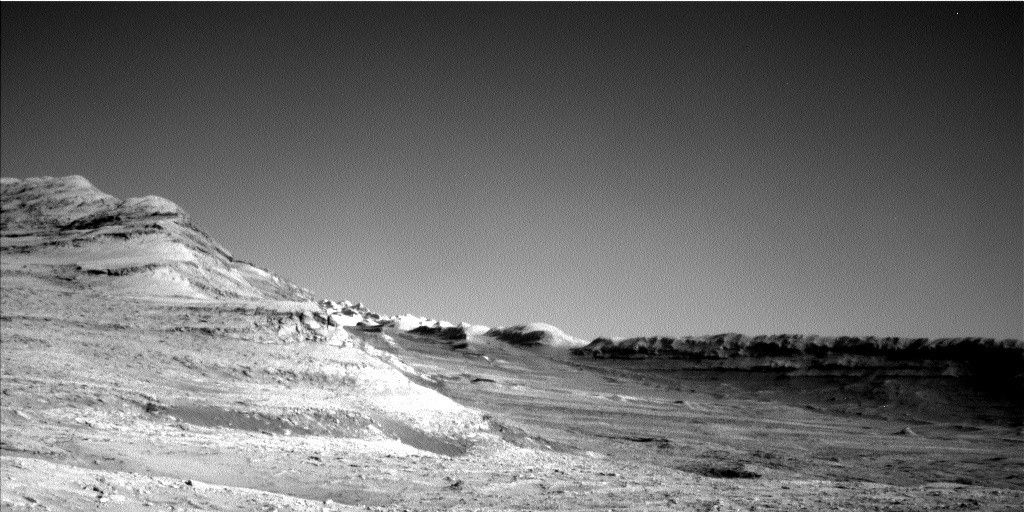
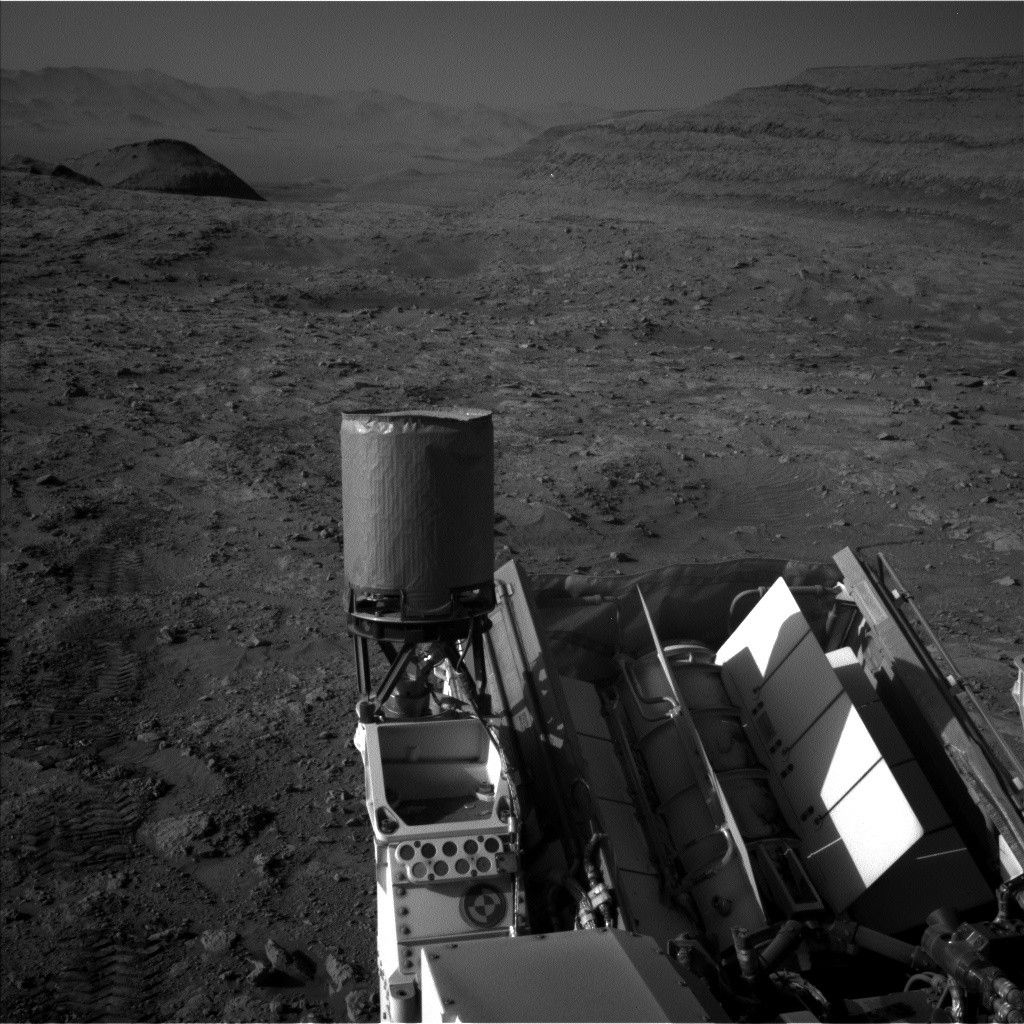
तथाकथित बॉक्सवर्क संरचनाएं ऑर्बिट और लॉन्ग-डिस्टेंस रोवर इमेजिंग दोनों से देखी गई प्रतिरोधी लकीरों की एक श्रृंखला हैं (एशले का ब्लॉग यहां देखें)। न केवल ब्याज की लकीरें हैं (क्या वे बढ़े हुए द्रव-प्रवाह और सीमेंटेशन का संकेत देते हैं?), लेकिन सामान्य रूप से बहिर्वाह की अभिव्यक्ति बदल गई, जब हम लकीरों की मेजबानी करने वाली चट्टानों पर एक उथले गर्त में चला गया।
यह योजना दिलचस्प बॉक्सवर्क इलाके के लक्षण वर्णन को जारी रखेगी। हमारे पास आज हमारे कार्यक्षेत्र में एक अधिक प्रतिरोधी, रिज जैसी सुविधा का एक उदाहरण था (देखें छवि के साथ)। रिज की रचना की जांच ChemCam (लक्ष्य “Sisquoc River”) और APXS (लक्ष्य “पालो वर्डे पर्वत”) का उपयोग करके की जाएगी, जिसमें मास्टकैम और महली छवियां शामिल हैं। हम इस तरह की संरचनाओं के हमारे चल रहे प्रलेखन के साथ-साथ दूरी में एक स्पष्ट प्रतिरोधी बॉक्सवर्क रिज (“लेक कैचुमा”) के रूप में, एक बेडरॉक स्लैब के आसपास एक गर्त जैसी सुविधा के मास्टकम इमेजिंग का अधिग्रहण करेंगे। और हमारे मिशन के लिए पहली बार, हम सबसे लंबी दूरी की केमकैम रिमोट इमेजिंग मोज़ेक की योजना बना रहे हैं, जिसे हमने प्राप्त किया होगा-91 किलोमीटर (लगभग 57 मील) दूर! इरादा 3 डी व्यू बनाने के प्रयास में हायरिस ऑर्बिटल इमेज के साथ जमीन से लंबी दूरी के दृश्य की तुलना करना है। हम नियोजित 24-मीटर ड्राइव (लगभग 79 फीट) से पहले एक नवकैम बड़े धूल-शैवाल सर्वेक्षण में निचोड़ने में भी कामयाब रहे। एक बार जब हम अपने नए स्थान पर पहुंचते हैं, तो मार्डी रोवर के नीचे इलाके की एक छवि लेगा।
योजना को मानक रेम्स, डैन और रेड गतिविधियों के साथ गोल किया गया है।