3 मिनट पढ़ें
सोल 4391-4392: मोड़ का चक्कर

पृथ्वी नियोजन तिथि: बुधवार, 11 दिसम्बर, 2024
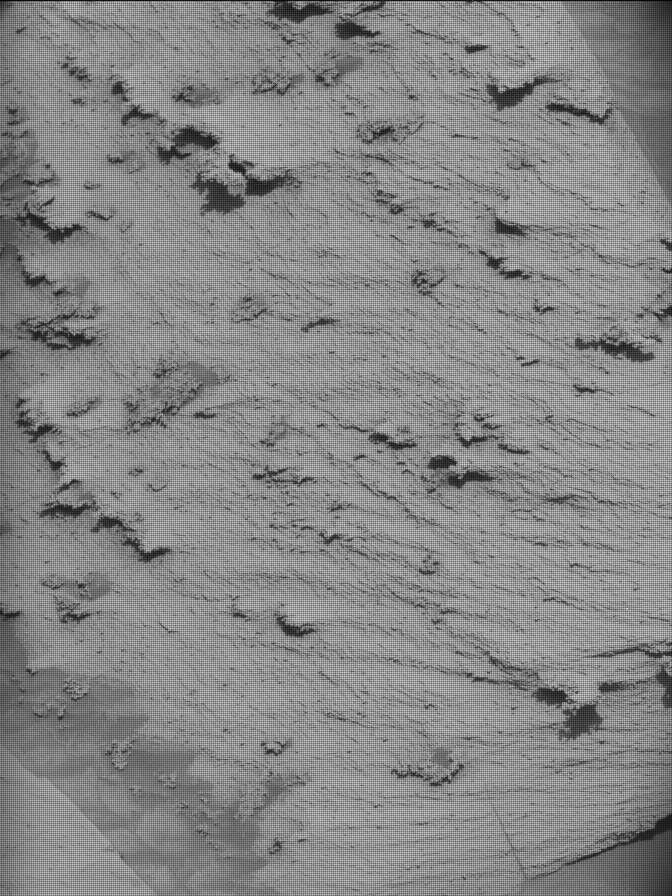
आज की योजना बनाने के लिए, हमारे पास टेक्सोली के उत्तरी सिरे का एक सुंदर दृश्य है, जैसा कि छवि के अग्रभूमि में देखा जा सकता है। दुर्भाग्य से, जो चट्टानें दृश्य को इतना सुंदर बनाती हैं, उन्होंने संपर्क विज्ञान के लिए हाथ खोलना भी असुरक्षित बना दिया है। इसके बजाय हम बहुत सारी इमेजिंग और ड्राइव कर रहे हैं। केमकैम एलआईबीएस और मास्टकैम स्टीरियो के लिए हमारा प्राथमिक दूरस्थ विज्ञान लक्ष्य “बैकबोन ट्रेल” है, जो परतों की संरचना और अभिविन्यास को मापने के लिए कई नसों वाला एक ब्लॉक है। हमारे पास उत्तर में “विलकर्सन” बट्टे और “ग्रांट लेक” क्रेटर के केमकैम आरएमआई लक्ष्य भी हैं। मास्टकैम “गोल्ड मेसा” के कई अन्य मोज़ेक भी ले रहा है, एक बट जो देखने में नया है, और “ड्राई लेक” और “जॉबोन कैन्यन” के आधार लक्ष्य में कुछ तलछटी लहर की विशेषताएं हैं। और, चूंकि हम टेक्सोली के उत्तरी बिंदु के जितना करीब होंगे, हम निश्चित रूप से वहां के शानदार स्तरित ब्लॉकों का एक मास्टकैम मोज़ेक भी लेंगे।
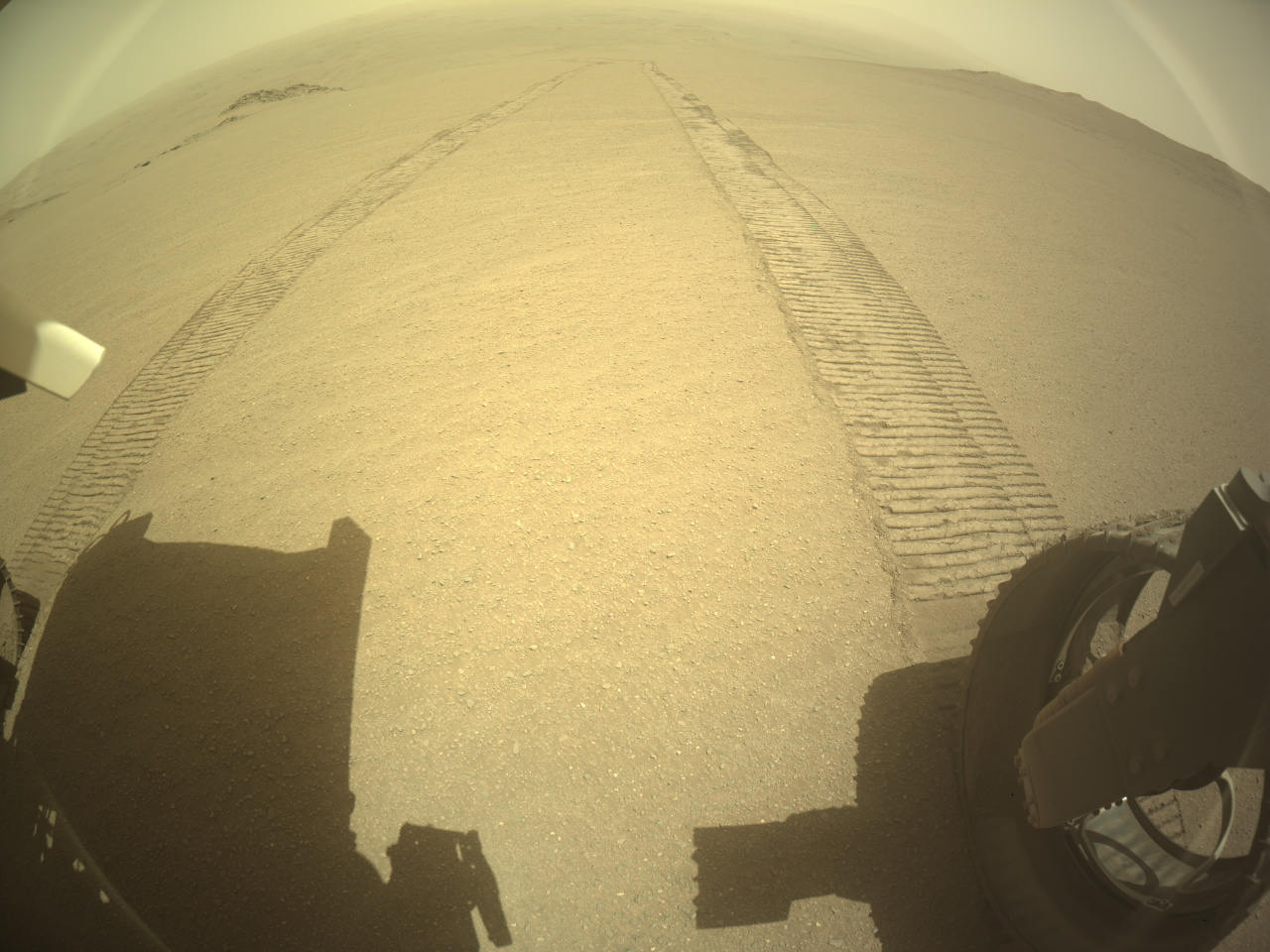
एक झपकी के बाद, हम गाड़ी चलाने के लिए तैयार हैं! मुझे आज मोबिलिटी रोवर प्लानर के रूप में ड्राइव की योजना बनानी थी, लेकिन जटिल इलाके के लिए वास्तव में आज सभी रोवर प्लानर्स को शिफ्ट करने की आवश्यकता थी। जब हम दक्षिण-पश्चिम की ओर जाना चाहते थे, तो कुछ बड़े अवरोधों और उच्च झुकाव से बचने के लिए हमें थोड़ा उत्तर की ओर (दिखाई गई छवि के दाईं ओर) मुड़ना पड़ा। कुछ छोटी नुकीली चट्टानों पर गाड़ी चलाने, ब्लॉकों के किनारों पर पहियों को खरोंचने, या ब्लॉकों के किनारे स्टीयरिंग से बचने के लिए रास्ता बहुत सीमित है जिससे स्टीयरिंग विफल हो सकती है। और हमें यह सुनिश्चित करने के लिए अपने एंड-ऑफ-ड्राइव हेडिंग के बारे में भी चिंता करने की ज़रूरत है कि एंटीना अगली योजना के लिए पृथ्वी से बात करने के लिए स्पष्ट होगा। हमने वास्तव में दिलचस्प और घुमावदार 24-मीटर पथ (लगभग 79 फीट) को लागू करके सब कुछ अनुकूलित करने में मदद करने के लिए ऑनबोर्ड व्यवहार पर भरोसा करना समाप्त कर दिया। अंत में, ड्राइव के बाद हम रोवर के ऑनबोर्ड रवैये के अनुमान में त्रुटि को कम करने में मदद के लिए सूर्य का अवलोकन कर रहे हैं। उम्मीद है कि यह ड्राइव हमें टेक्सोली द्वारा बनाए गए अवरोध से पार दिलाएगी और हमें ड्राइव की अगली श्रृंखला के लिए दक्षिण-पश्चिम में एक लंबा रास्ता देखने की अनुमति देगी।
योजना का दूसरा सोल, ड्राइव के बाद अलक्षित अवलोकन, मुख्य रूप से वायुमंडलीय अवलोकनों पर केंद्रित है, जिसमें मास्टकैम सौर ताऊ, और नवकैम सुपरहोराइजन और धूल-शैतान छवियों और फिल्मों की एक लंबी श्रृंखला शामिल है। हमने एईजीआईएस का उपयोग करके क्यूरियोसिटी को अपना लक्ष्य चुनने की भी अनुमति दी। वह क्या चुनती है यह देखने के लिए इंतजार नहीं कर सकती!
नासा की जेट प्रोपल्शन प्रयोगशाला में मिशन ऑपरेशंस इंजीनियर एशले स्ट्रूप द्वारा लिखित